

机器视觉自动检测技术:系统组成
PC—BASED机器视觉系统组成:相机、镜头、光源、传感器、图像采集卡、PC平台、视觉处理软件、控制单元。
1. 相机
按感光芯片分类:CCD、CMOS
CCD相机成像质量高,CMOS低成本、低功耗。
按像元排列方式:面扫描、线扫描
面扫描相机拍摄影像时大量传感器同时瞬间捕捉影像,一次曝光完成;运动物体用频闪照明;图像用一个事件触发采集。
相机主要特性:分辨率、帧率、曝光方式、快门速度、像素深度、固有图像噪声、动态范围、光学接口
2. 镜头
主要参数:
焦距:焦距大,视角大
光圈:调整进光量
视野范围:相机实际拍到区域的尺寸
工作距离:镜头第一个工作面到被测物体的距离
像面尺寸:像面尺寸大于CCD尺寸
畸变:源于镜头制造误差
工作波长与透过率:
景深:指在被摄物体聚焦清楚后,在物体前后一定距离内,其影像仍然清晰的范围。光圈大,景深小;焦距长,景深小;距离物体近,景深小。
3. 数字图像数据传输方式
IEEE39、USB传输、Camera Link传输、无线传输
4. 偏振片
偏振片较有效地消除了强反射光线及散射光,使光线变得柔和,消除光反射产生的影响从而突出表面的细节。
5. 光源
分类:自然光源、人工光源
目前常用:发光二极管(LED)
光源布置应能保证需要检测的特征突出于其他背景。
LED光源照明设计:
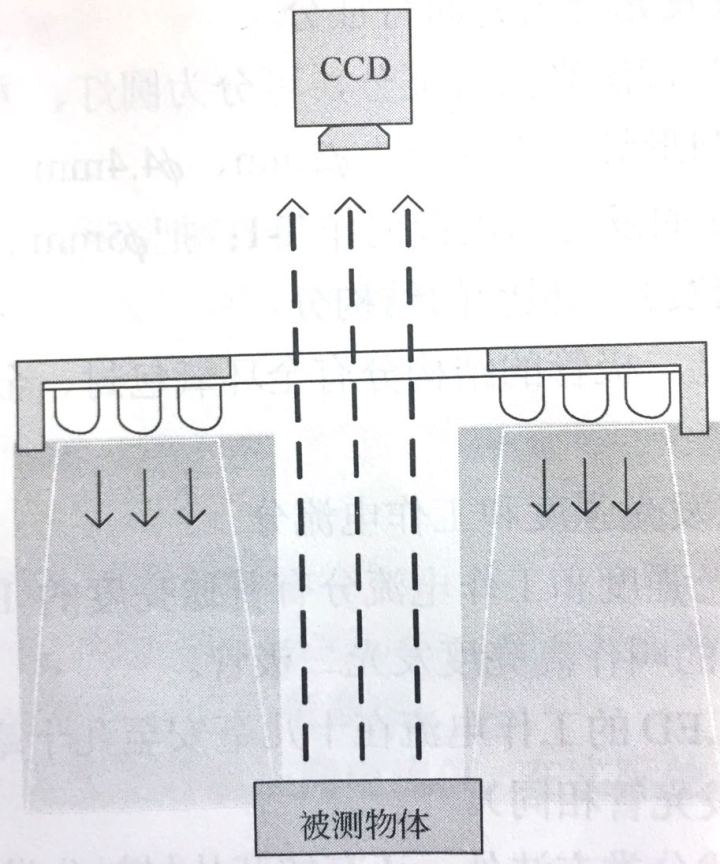
5.1 垂直直射环形光源
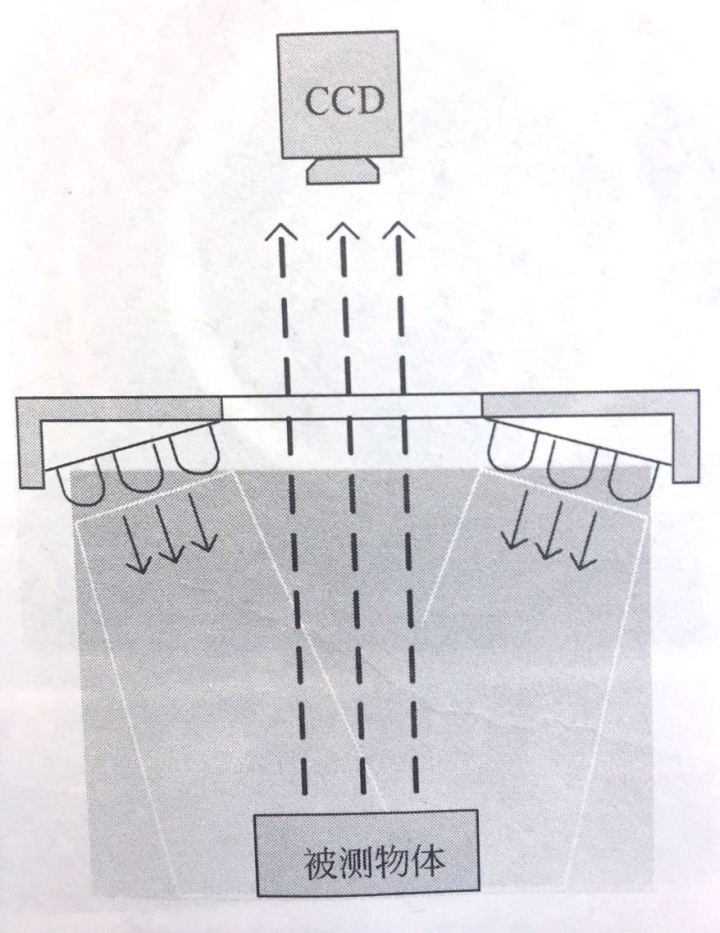
5.2带角度直射环形光源
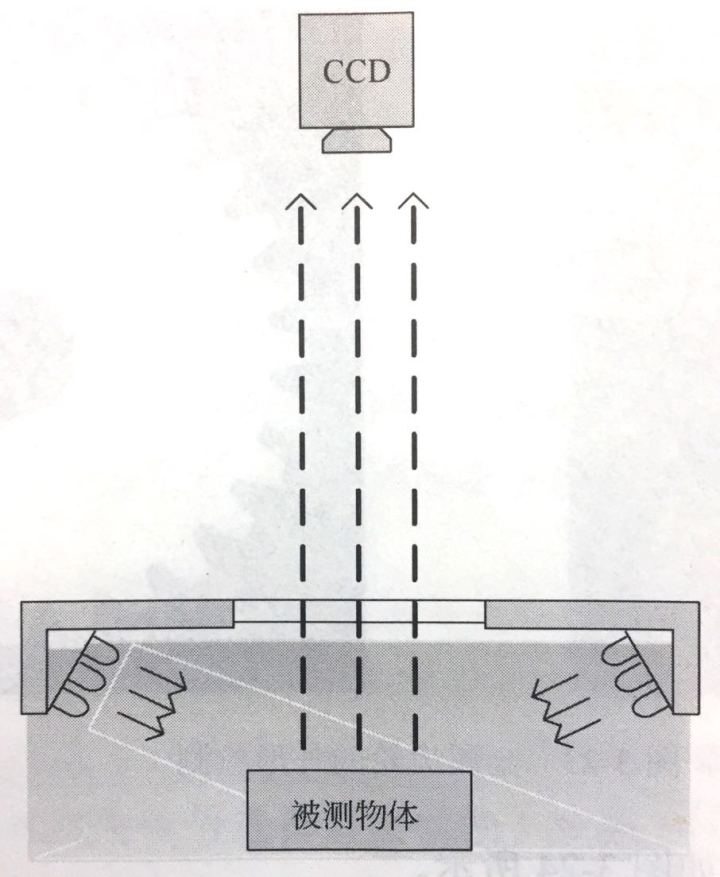
5.3低角度直射环形光源

5.4水平直射环形光源
5.1与5.2为明视野照明,故被测物体表面大部分反光都能进相机,故背景呈白色,表面特征呈黑色;5.3与5.4为暗视野照明,被测物体表面大部分反光都不进入相机,故背景呈黑色,表面特征呈白色,突出物体表面瑕疵。
5.5无影环形光源(Dome灯)
完全消除阴影,实现全空间区域的漫射光照明,对于凹凸不平的表面检测起到特殊作用,主要用于球形或曲面物体缺陷检测以及金属、镜面或玻璃等具有光泽物体的表面检测。

5.5无影环形光源(Dome灯)

5.6同轴光源
5.6同轴光源
指与相机的轴向有相同方向的光照射到物体表面,用于观察非常平整或抛光的具有镜面特性表面的瑕疵,还可实现表面角度变化部分高亮。
5.7背光源
光源放置在相对于摄像头的物体的背面,可以检测物体轮廓以及透明物体的纯净度,但会丢失表面特征。
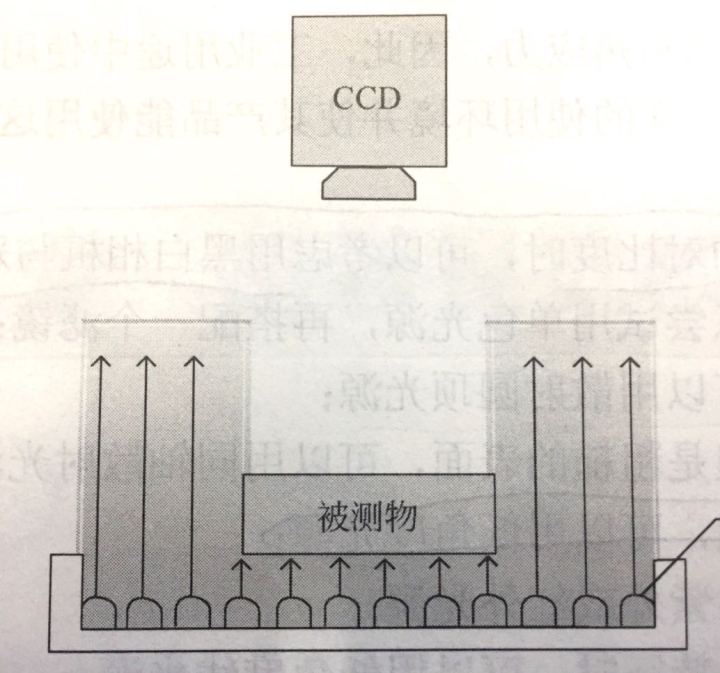
5.7 背光源
LED光源颜色选型:
波长越长,对物体穿透力越强;波长越短,对物体扩散率越大。故检测物体表面质量,适宜波长短的蓝光;检测透明物体纯净度,适宜波长长的红光。(来源:知乎Anthony)
 微信在线咨询
微信在线咨询